Quick Start¶
Note: if the figures are blur, click on the figure to see the clearer version
OpenRTK330LI EVK Introduction¶
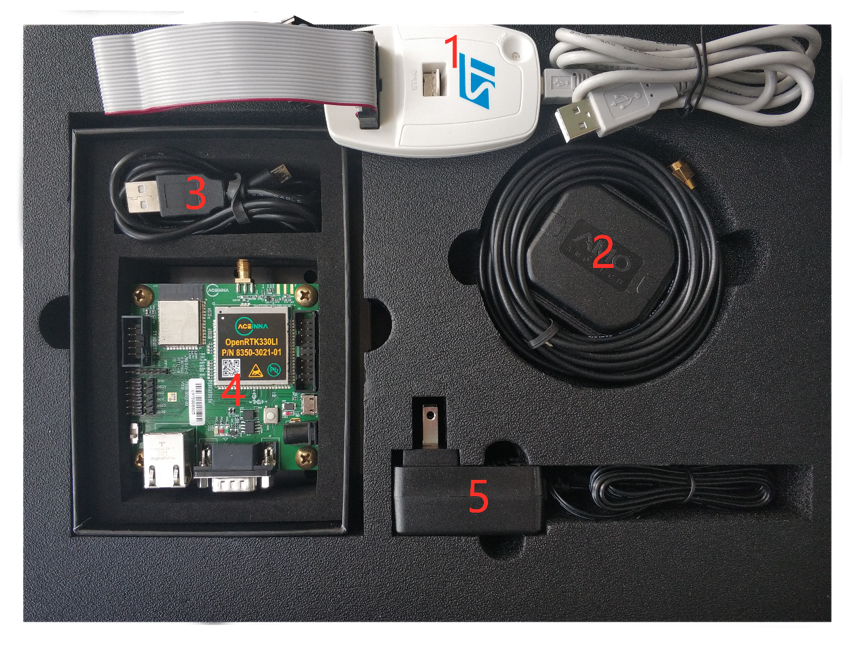
The OpenRTK330LI Evalution Kit (EVK) is designed to evaluate the OpenRTK330LI module with the online Aceinna Navigation Studio (ANS) and related software stack. A full set of OpenRTK330 EVK is shown below after you unpack the product box.
where
- 1: ST-Link debugger
- 2: Multi-Constellation and Multi-frequency GNSS antenna, supports
- GPS L1/L2/L5
- GLONASS L1/L2
- GALILEO E1/E5/E6
- BEIDOU B1/B2
- 3: Micro-USB cable
- 4: OpenRTK330 Evaluation Board (EVB) with metal flat mounting board
- 5: 12-V DC adapter with 5.5 x 2.1 mm power jack
The picture below shows the detailed overview of OpenRTK330 EVB
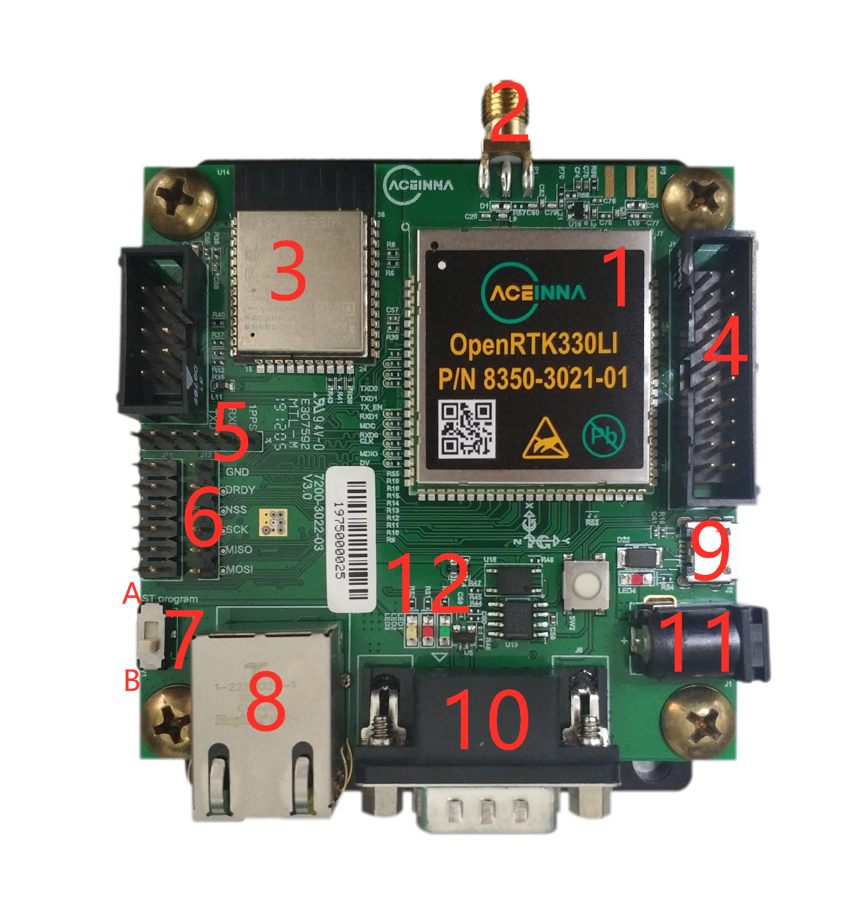
where some of the parts are listed here
1: OpenRTK330 GNSS/IMU integrated module
2: GNSS antenna SMA interface
3: Espressif ESP32 bluetooth module
4: SWD/JTAG connector, 20-pin
7: Boot mode swtich
- Position A: booting from bootloader
- Position B: normal working mode
8: RJ45 jack for Ethernet connection
9: Micro-USB port
10: 9-pin CAN interface
- Pin-7: CAN_H signal
- Pin-2: CAN_L signal
12: EVB working status LEDs, yellow, red, and green LED from left to right
Quick Setup and Usage¶
Prerequisites¶
Hardware
- OpenRTK330LI EVK
- Ethernet cable (must have, not included in the EVK)
- Ethernet router/network switch (optional, not included in the EVK)
Software
- The online Aceinna Navigation Studio (ANS) deverloper website, manily for
- OpenRTK devices management and technical forum and support
- Web-based Graphical User Interface (GUI)
- App center for online firmware upgrade
- The OpenRTK Python driver: Python based program runs on a PC, click here to download the latest version of executables
- Send/Receive data from ANS to enable Web GUI and online firmware upgrade for OpenRTK330LI device
- Log and parse OpenRTK330LI output data, positioning solution and other debug information to binary and text files
Usage Steps¶
- Power and data link: connect the EVB with a PC using a Micro-USB cable, and the YELLOW LED (#12 on the EVB figure above) flashes. The EVB is powered on, and four serial com ports are established on the PC.
- Antenna: connect a GNSS multi-frequency antenna to the SMA interface (#2 on the EVB figure), the GREEN LED (#12 on the EVB figure above) flashes if the incoming GNSS signal is valid
- Network: Use an Ethernet calbe to connect the EVB with a network router or switch, and then connect a PC to the same router/switch using an Ethernet cable. The OpenRTK330LI EVB gets internet access and assigned an IP address in the local network via DHCP.
- GNSS RTK and INS Configuration: open a browser (Google Chrome is recommended), visit http://openrtk,
You will firstly see the following device running status page
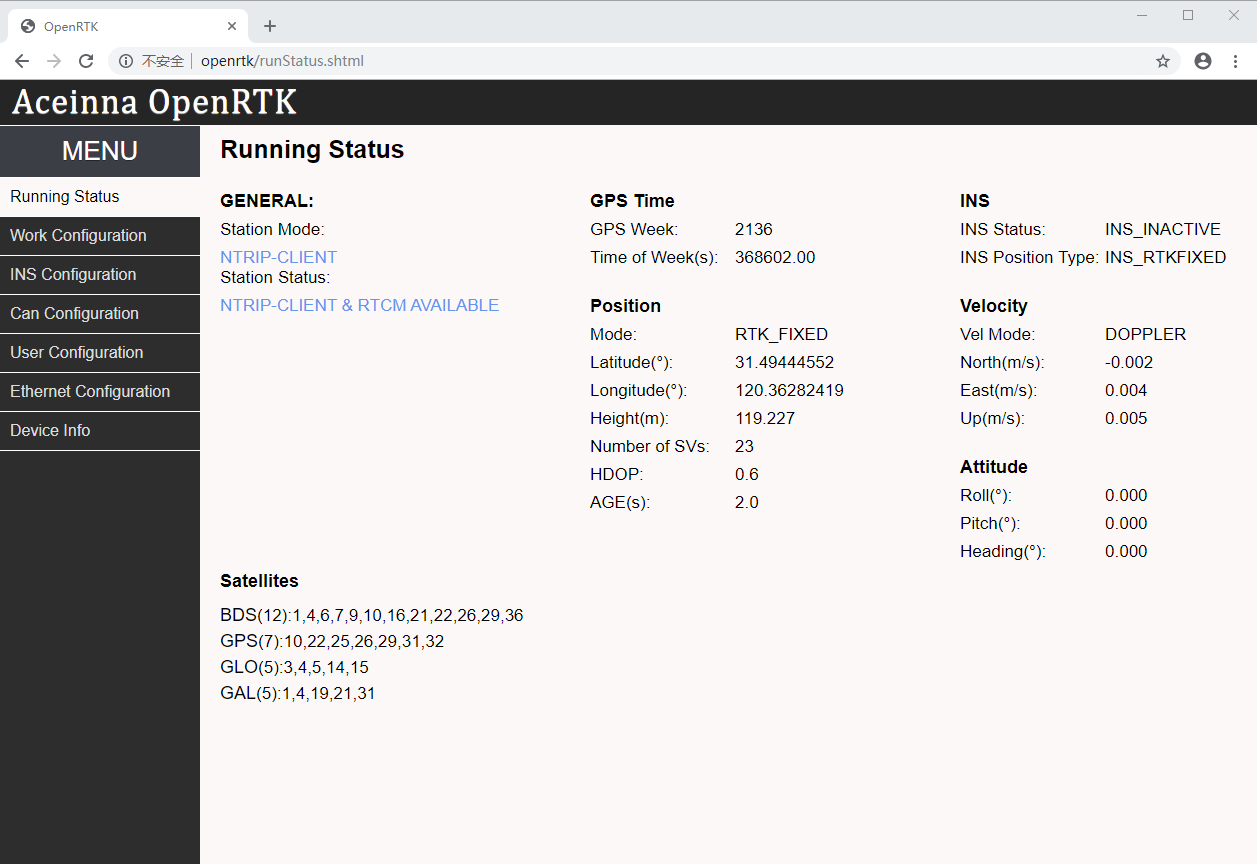
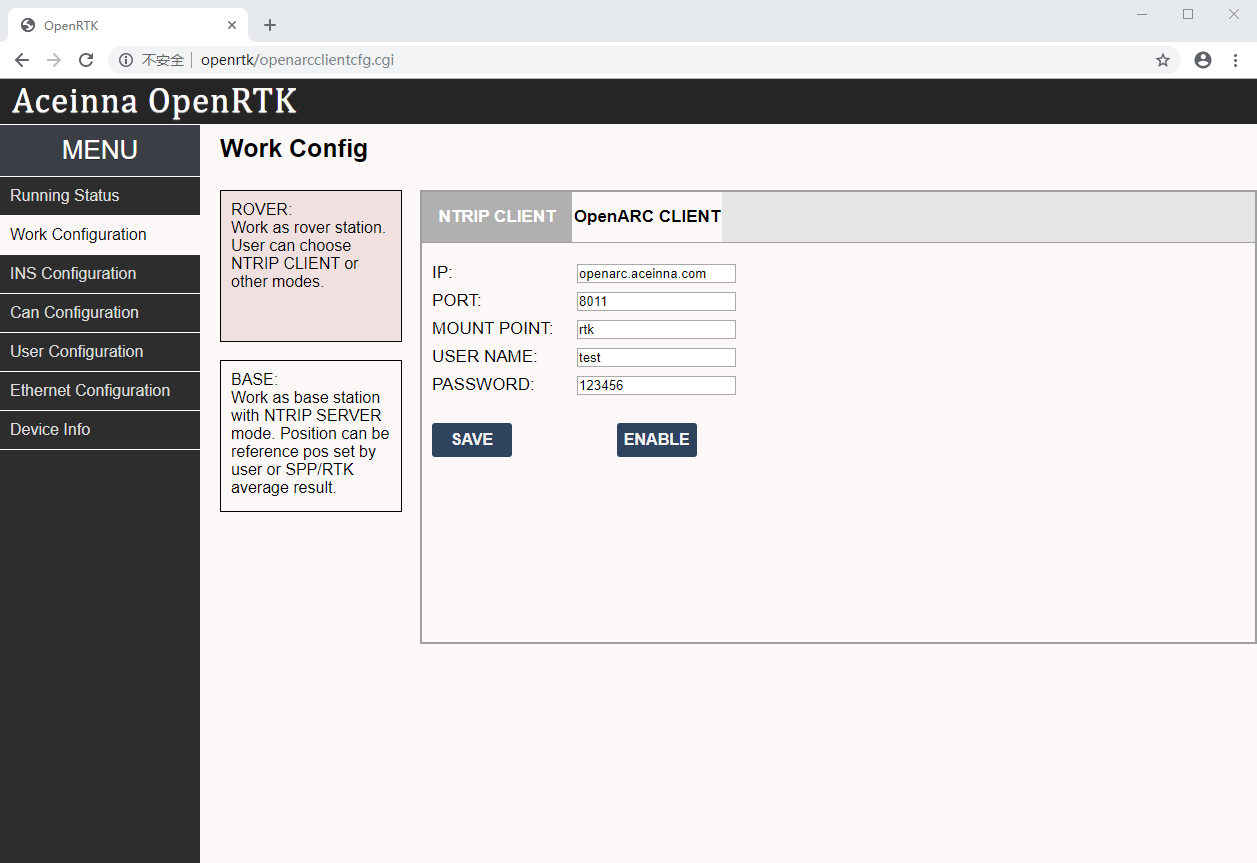
On the left side menu bar, click “Work Configuration” tab to choose the following working mode of the device and configure it accordingly:
- Rover: works as a nomarl GNSS positioning unit that is also referring to “NTRIP client” receiving GNSS data correction
- Base: works as a GNSS reference station with known position and sending GNSS data to “NTRIP server” to be used as GNSS data correction
Please refer to the “How-to-use” chapter for the detailed configurations.
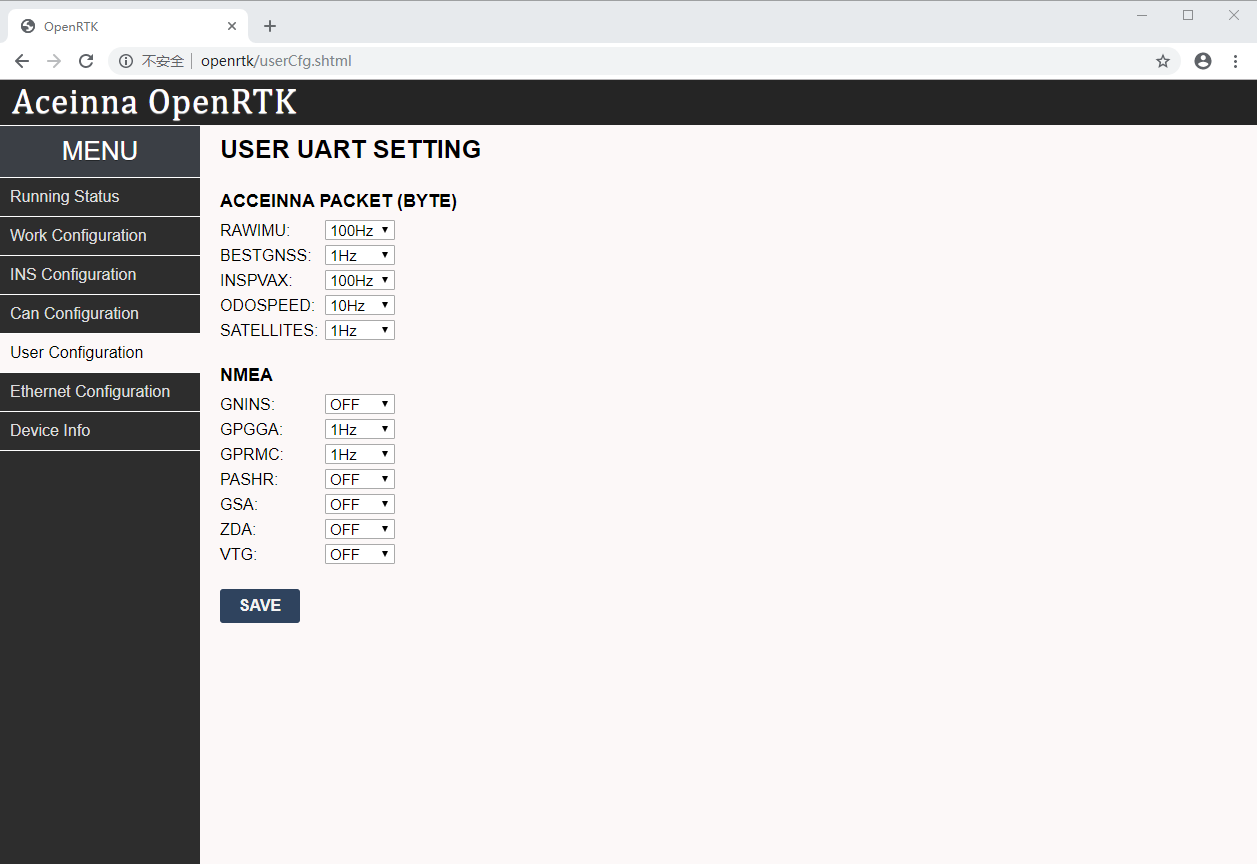
On the left side menu bar, click “User Configuration” tab to select the user output data and rate among the options provided, including NMEA0183 messages and Aceinna format binaries
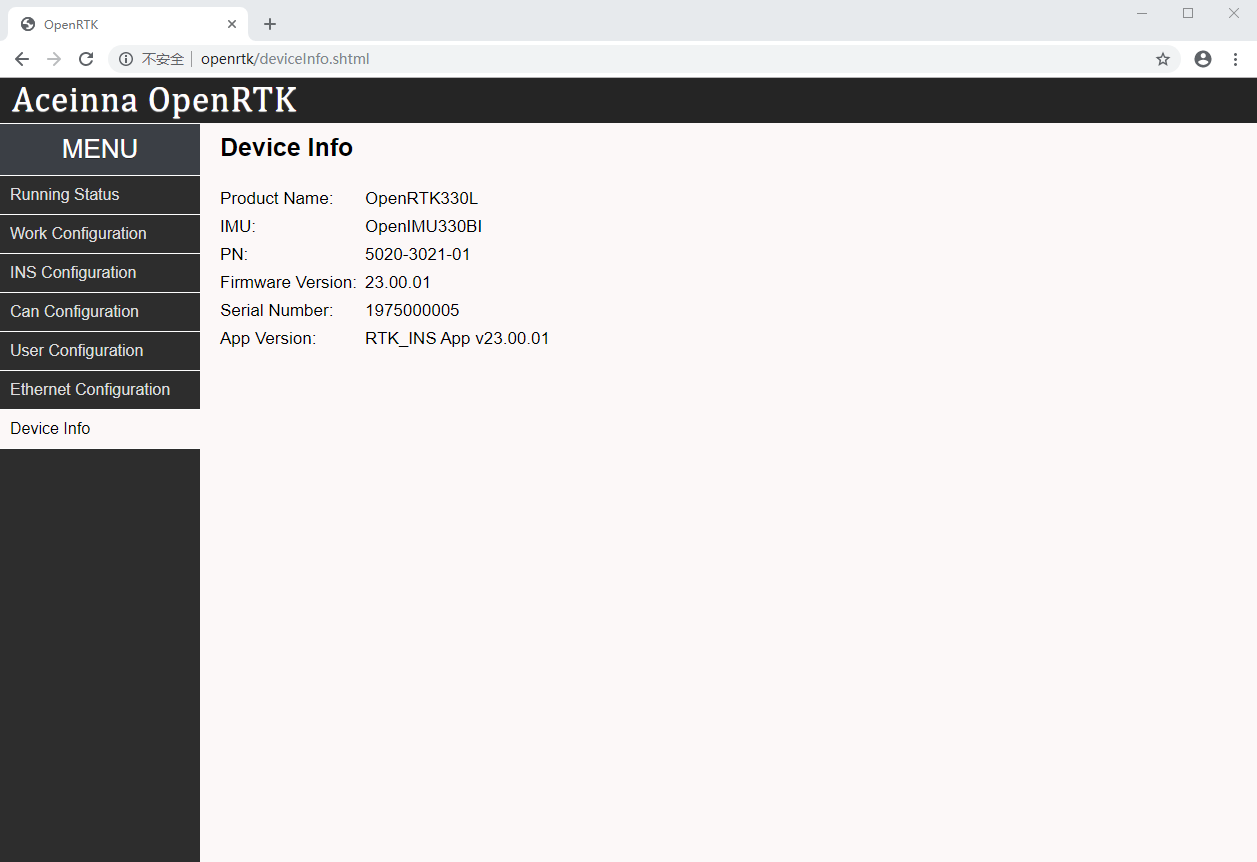
On the left side menu bar, click “Device Info” tab to have the detailed device information displayed, including firmware version, product number and serial number etc..
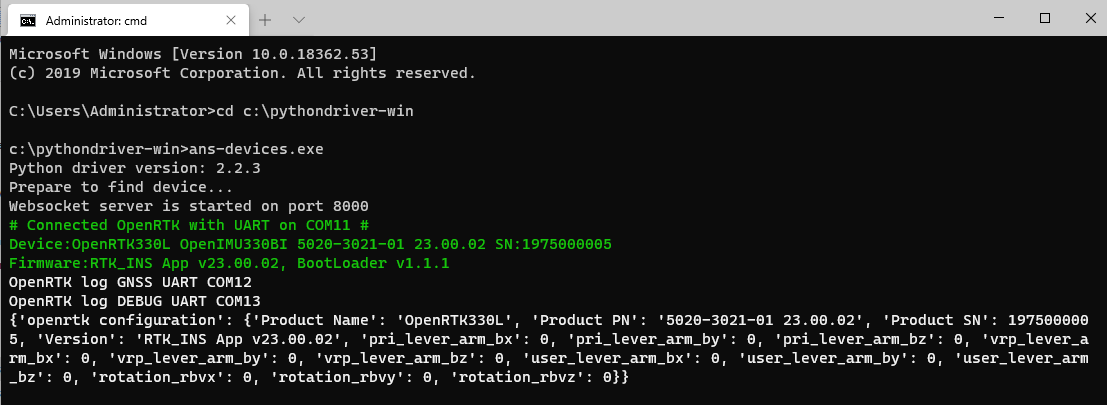
Live Web GUI: download the latest Python driver executable (v2.2.4 and later), and run it in a command line, for example:
cd c:\pythondriver-win .\ans-devices.exe
Check the console output, the Python driver connects the device and the online ANS website, if successfully, the following connection information is displayed
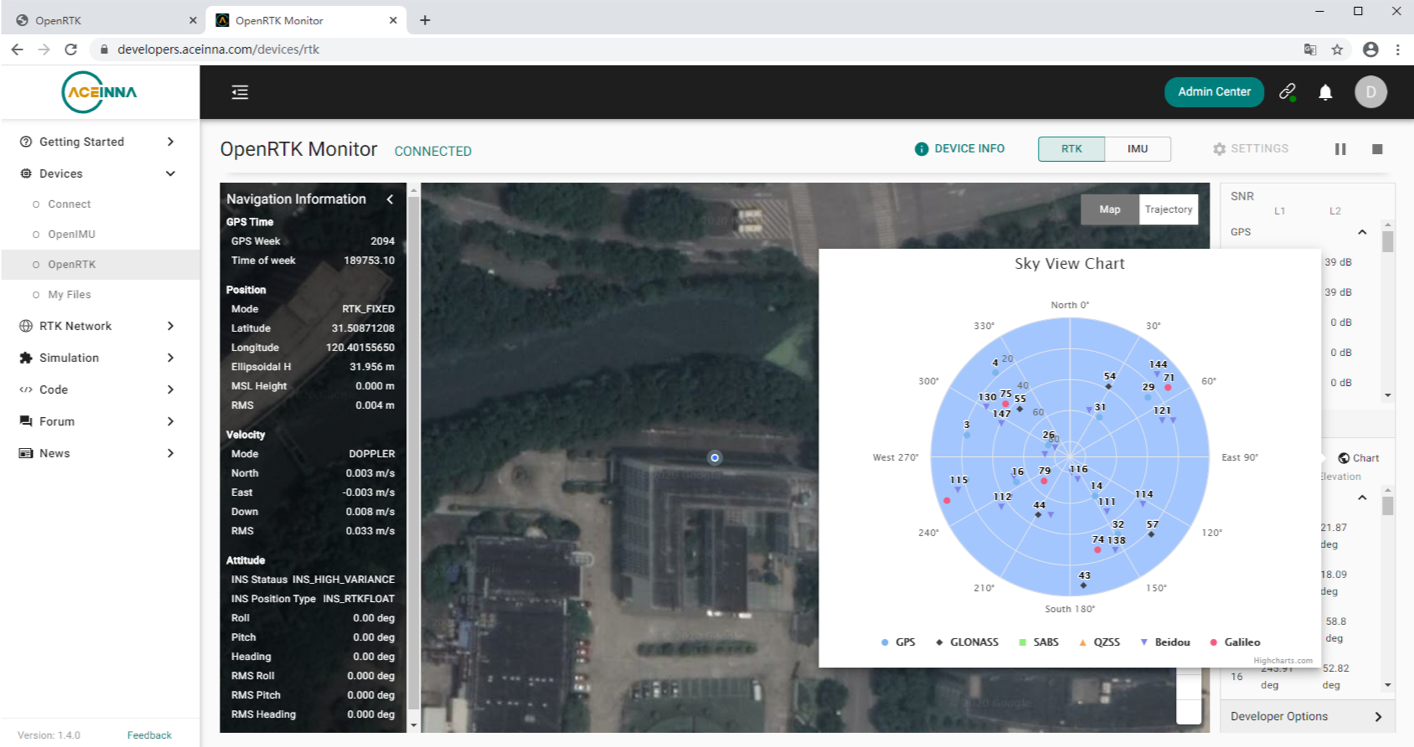
Go to the online ANS, on the left side menu bar, click “Devices”->”OpenRTK”, then we will have the “OpenRTK Monitor” webpage as shown below, and the center “Play” button is highlighted indicating correct device connection with the Web GUI,
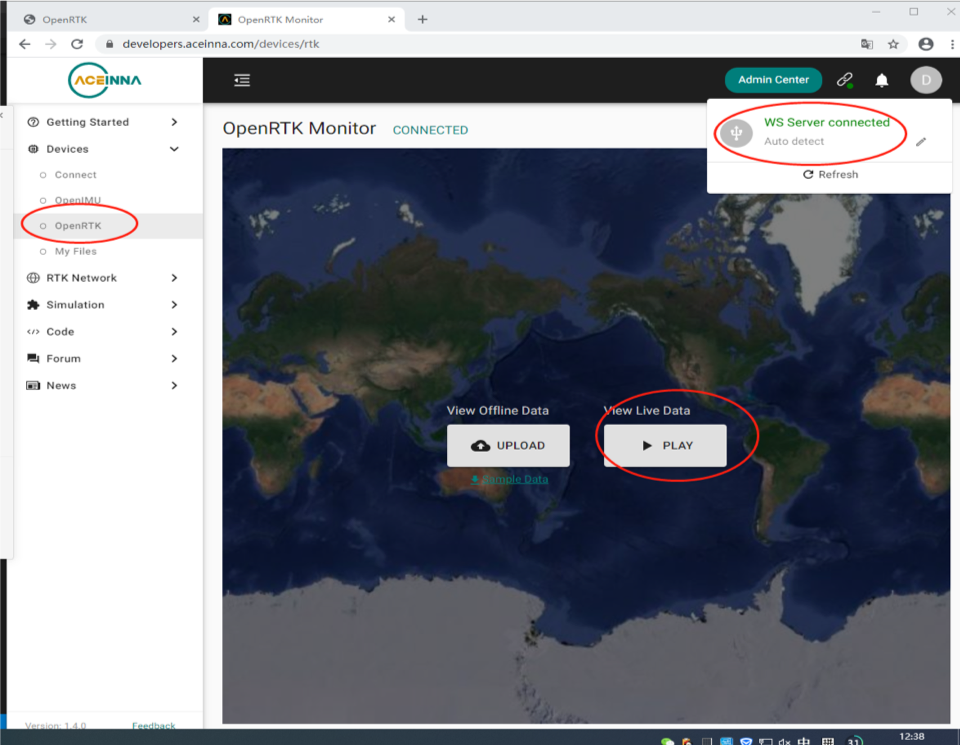
Click “Play”, you will have a live web GUI showing positioning information, map presentation and associated satellites information
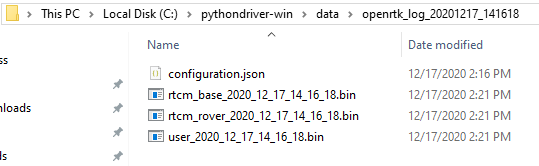
Data Logging and Parsing: when the device is connected with the PC via the micro-USB cable, the running Python driver is logging all serial port output into files, including raw GNSS/IMU data, positioning solution and the device configuration. These files are located in a subfolder labelled “.pythondriver-windataopenrtk_log_xxxxxxxx_xxxxxx”, e.g.
which,
- configuration.json: is the device configuration information
- rtcm_base_xxxx_xx_xx_xx_xx_xx.bin: is the received GNSS RTK correction data through internet, in RTCM format
- rtcm_rover_xxxx_xx_xx_xx_xx_xx.bin: is the GNSS raw data from the device, in RTCM format
- user_xxxx_xx_xx_xx_xx_xx.bin: is the output from the USER UART, including NMEA0183 messages in ASCII format, raw IMU data and GNSS RTK/INS solution in binary format
Go to the “openrtk_data_parse” subfolder, run the parser executable as below
cd c:\pythondriver-win\ .\ans-devices.exe parse -t openrtk -p ..\data\openrtk_log_20201217_141618
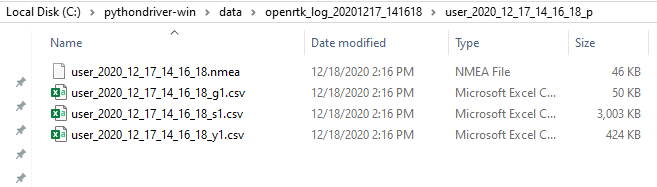
A subfolder with the name “user_xxxx_xx_xx_xx_xx_xx_p” is created and contains the decoded files all in ASCII format, e.g.
which:
- user_xxxx_xx_xx_xx_xx_xx.nmea: contains the GGA and RMC NMEA0183 messages
- user_xxxx_xx_xx_xx_xx_xx_g1.csv: is the GNSS RTK solution
- user_xxxx_xx_xx_xx_xx_xx_s1.csv: is the raw IMU data
- user_xxxx_xx_xx_xx_xx_xx_y1.csv: is the GNSS satellites information that are used in the solution